电动爪
yrg系列电动夹持器可实现夹持力控制、速度控制、加速度控制、多点位置控制、工件测量。
YRG系列
RCX340控制器的电动拉手
易于操作,因为雅马哈机器人语言提供统一控制
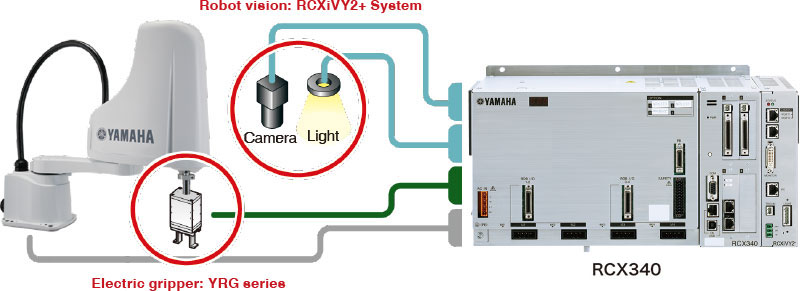
一种电动夹持器,可实现高精度的夹持力、位置和速度控制,这是传统空气装置难以实现的。夹持器仅由一个4轴控制器RCX340控制。由于不需要与PLC等主机单元进行数据交换,因此可以轻松地进行设置或启动。





功能
01电动夹持器,高精度夹持力,定位,速度控制
YRG提供了抓地力控制,速度和加速度控制,多点定位和工件测量,这些都是空气驱动设备的难点。YRG被证明是一个灵活的适合广泛的应用。
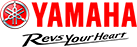
夹持力控制
夹持力可按1%步长设定。容易破碎或变形的工件,如玻璃或弹簧,可以夹紧。即使手指位置发生变化,夹持力也是恒定的。
多点位置控制
手指可根据工件尺寸设置到所需位置。这有助于提高不同工件尺寸和材料混合的生产线以及安装步骤多的生产线的效率。
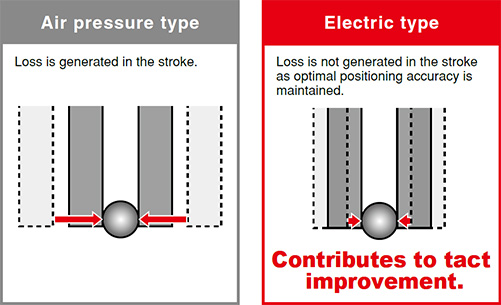
工件存在检查功能
电动抓手输出HOLD信号。可检查工件夹持错误或转移过程中工件掉落。不需要外部传感器。
测量功能
通过位置检测可以对被夹工件进行测量。使用此函数可以正确判断工件的哪个部分被夹住。
区域范围函数
使用这个区域范围函数可以判断大小OK/NG和检查倾斜插入。
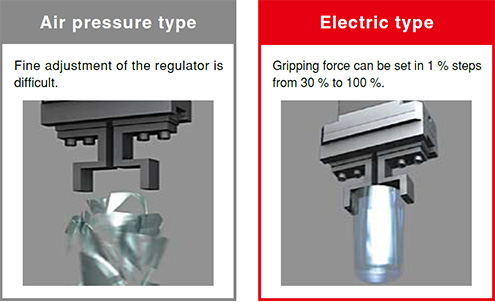
速度控制
速度和加速度可以设置在20到100毫米/秒的范围内。在1%的步骤(单凸轮和三指类型)。夹持器可以轻轻触碰易受冲击的工件,如透镜或电子元件。
02单控制器可控
一个多轴控制器RCX340单元可以控制包括抓手在内的所有机器人操作(使用安装在RCX340中的控制板)。不需要与PLC等主机设备进行数据交换,因此设置和启动非常简单。
03结合视觉系统支持广泛的应用
即使是复杂的系统也可以通过使用YRG系列夹持器与控制器集成机器人视觉“iVY系统”相结合来轻松配置。
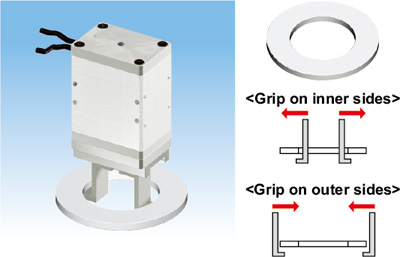
04保护(不翘曲)输送塑料环等。
测量功能(保持工件轮廓)
夹持力控制(保持工件轮廓,防止工件划伤)
速度控制(保持工件轮廓和防止工件划伤)
多点位置控制(适用于多种工件)

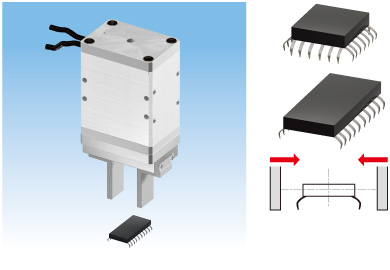
05芯片组件输送防翘曲和铅突出检查
测量功能(检查铅突出尺寸)
夹持力控制(保持工件轮廓,防止工件划伤)
速度控制(保持工件轮廓,防止工件划伤)
多点位置控制(适用于多种工件)
06大型、灵活、轻质物品的输送和尺寸检查
测量功能(测量工件尺寸)
夹持力控制(防止工件翘曲)
速度控制(防止工件划伤)
多点位置控制减少设置/转换任务(提高工作效率)
07电动夹持器夹持力比较

机器人操作
销售及市场组
FA销售和市场部门
日本静冈县滨松北区丰丰127号,邮编433-8103
电话81-53-525-8350/
传真81-53-525-8378