两轴控制器RCX221 / RCX222先进功能
介绍了两轴控制器,RCX系列。

功能
01支持所有雅马哈机器人模型
RCX系列支持所有雅马哈机器人模型如移相器、FLIP-X XY-X。它使大多数类型的应用程序可能因为单轴(FLIP-X /移相器)和笛卡尔机器人可以用于任意组合(不包括一些小型单轴机器人)。
02绝对完整的规格
RCX使用完整的绝对规范当然不需要返回起源时打开。它还支持增量规格完全相同的系统(移相器系列利用磁规模和支持semi-absolute或增量规范。)
03再延长绝对数据备份时间
做一个节能备份电路显著延长保留时间的绝对位置数据在没有电源的应用。普通模式备份时间最多1个月现在已经提高了1年。当前位置信息现在可以长假期,期间监测设备存储,甚至在运输和起源返回不需要当电力恢复。这允许快速和容易的生产企业。
04区域检查输出函数
这个函数提供了一个输出信号当机器人进入预设区域。可以指定多达四个领域。

05年Dual-synchronous开车
配备了双驱动函数来控制两轴同步,这是有效的用于携带重物和笛卡儿的长冲程操作的机器人。这个函数允许充分利用高速,雅马哈的加速/减速特性机器人。
- 请注意。
- 双驱动函数、自定义顺序安排是必需的。有关更多信息,联系雅马哈。
Dual-synchronous驱动的例子。
06Double-carrier防撞控制功能
使用double-carriages时运营商之间的碰撞,可预防控制功能的控制器。前碰撞预防措施,如区域判断或外部传感器不再需要所以double-carriers现在比以往任何时候都更容易使用。
07年3 d圆插补控制
2 d和3 d线性和环形内插法弧控制是可行的,从而使RCX141控制器适合密封工作,等等。(三维插值只有RCX340)

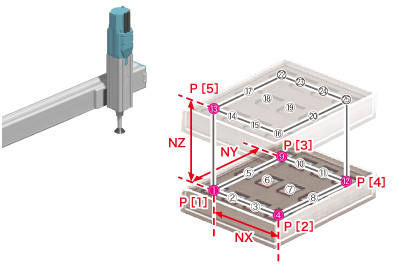
08年托盘包装的功能
这个函数可以很容易地定义一个最大20进入教学分类型的托盘的托盘上的4个角落位置。进入教学点沿高度允许处理立方托盘。指定定义托盘。运动和执行命令来执行托盘包装。这个程序可以执行各种操作,如1点→托盘,托盘→1点,托盘→托盘等。
09年手的定义
这个函数操作机器人基于坐标时,工具提示已经安装在机器人轴的偏移位置。这是特别有效期间工具旋转与轴旋转SCARA机器人和机器人。
10转换坐标
可能发生偏差或抵消在服务任务,比如机器人的坐标重新安装或更换。在这些情况下使用坐标可以通过使用转变协调函数修正点数据可以使用,而无需更改,不需要培训。

11通过点输出控制
这个函数可以打开或关闭通用输出指定点所以操作可以继续沿着一个轴没有停止在插值的任务。这输出一个喷雾打开或关闭信号同时操作在一个轴密封,使稳定的密封胶和光滑的涂层。

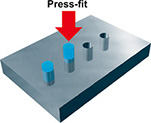
12转矩限制开车
电动机转矩可以把握和press-fitting操作期间是有限的。
13多任务功能
这个函数执行多个任务(8个任务)多个任务将与分时切换方法。然而,一个优先级可以分配给每个任务。这个优先级任务运行时也可以改变。多任务功能简化了整个系统窶冱控制配置和也提高了运行效率。
任务调度
14顺序程序
除了标准的任务,一个任务控制输入/输出(并行、串行、内存、定时器)可以独立执行。在手动模式序列程序是有效的,它是可用来构建安全系统与外围设备。
152-robot控制
分配2机器人单元为主要和子让他们同时由1控制器单元。结合多任务允许1控制器单元链接2机器人单元在一个光滑,复杂的操作。

16额外的轴函数“YC-Link”
使用一个可选的YC-Link, RCX系列控制器和SR1系列单轴控制器可以很容易联系。如果有必要,通过连接控制器,可以控制多达8轴(Max 6轴同步控制)。

17全力支持软件:贵宾+
VIP +是一个容易操作的应用程序软件,便于直观地理解任务,包括机器人操作,程序编写和编辑和教学。用户界面已经大大改善了相比以前支持软件VIP,现在是非常容易使用。

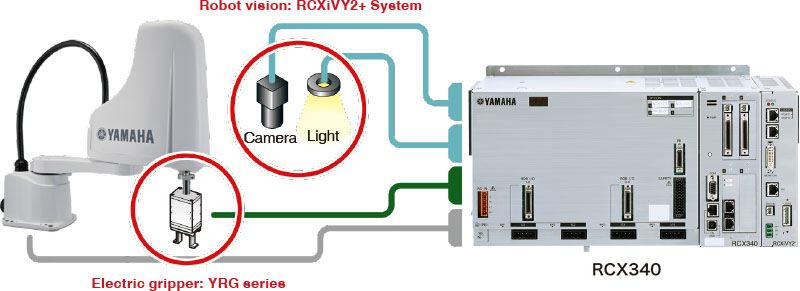
18可以使用“YRG系列”电动爪
所有功能的爪可以控制从一个RCX340控制器。设置和启动很容易因为没有信号交换与PLC或主机设备是必需的。
各种数据
两轴控制器RCX221 / RCX222先进功能
相关内容





机器人操作
销售&市场部分
足总销售和营销部门
127这个,Kita-ku滨松、静冈市433 - 8103年,日本
电话81-53-525-8350/
传真81-53-525-8378