多轴控制器RCX340
介绍了多轴控制器RCX340。

功能
01先进的功能,允许高水平的装备建设
通过高速通信,可以同时操作多个机器人。在控制器之间使用链接可以将程序存储到一个控制器中。新开发的算法减少了定位时间,提高了跟踪精度。
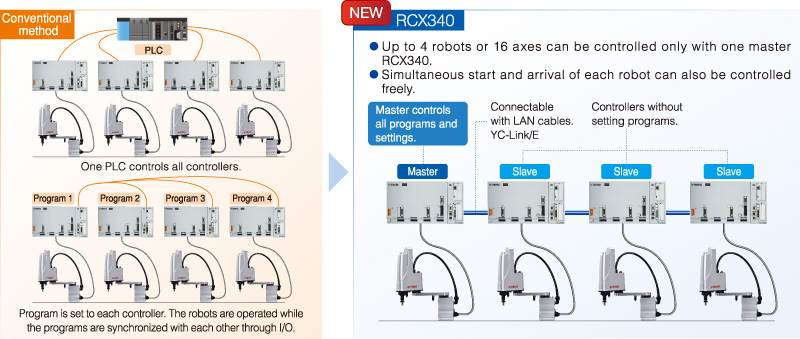
一个主控制器可以控制多个机器人。
RCX340控制器可实现控制器间高速通信。由于主控制器向每个从控制器发送操作命令,所以程序和点只能由主控制器控制。
此外,RCX340控制器可灵活支持多任务,可简化PLC的数据交换。每个机器人同时启动和到达也可以自由控制。
复杂精密的多轴机器人系统可以以较低的成本更简单地构建。
通过大幅度提高运动功能,实现平稳运动。
由于在控制器中加入了新的伺服运动引擎,各种操作可以链接起来。新开发的算法减少了定位时间,提高了跟踪精度。
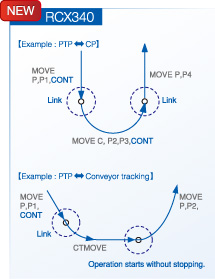
CONT选项功能的扩展
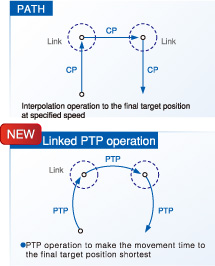
通过喜欢不同的操作,如PTP、插补操作和输送机跟踪,速度更快。
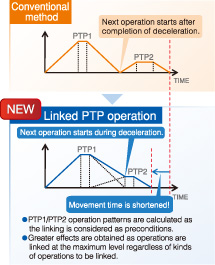
操作速度的提高
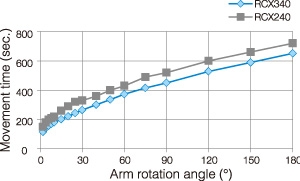
使用链接PTP可以尽可能多地链接所有操作。由于以操作时间为优先,将不同加减速时间的操作在最大程度上联系起来,运动时间可以大大缩短。
根据应用情况正确使用
当以恒定速度进行连续操作时,如密封,则使用常规PATH。在优先考虑移动时间时,使用喜欢的PTP。可以选择适合应用程序的最佳操作。
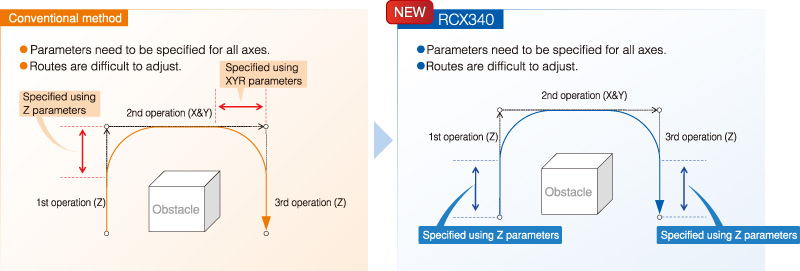
更直观的拱形运动设计是可能的。
改变了拱体运动路线的设计方法,简化了设计方法,使设计更加直观。
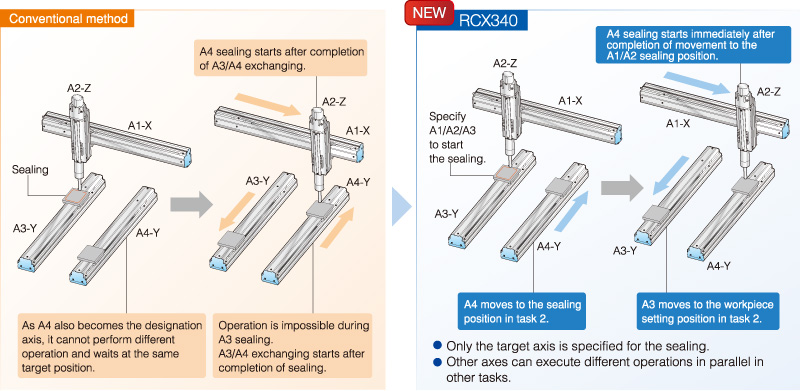
灵活的轴配置支持各种各样的应用。
示例:双车道插补操作
通过设置多坐标轴并使CP命令适用于轴的指定,可以实现双通道内插补操作。这大大缩短了具有相同坐标属性的多轴机器人的周期时间。
例如:四轴分发机器人A1-X/A2-Z/A3-Y/A4-Y
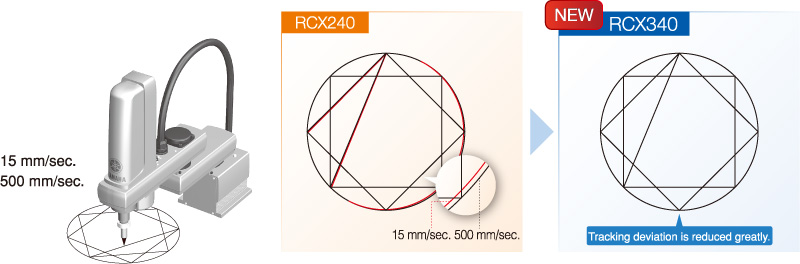
跟踪精度提高。
伺服分析函数的可视化和高响应性增加了跟踪性。与传统模型相比,这提高了跟踪精度。
02增强基本性能
改进了机器人语言、多任务、序列函数、通信和现场总线等功能,使其更易于使用。
运动的优化
为了使机器人的性能发挥到最大,进一步加强了与操作模式相对应的运动优化。实现了缩短操作时间或抑制停止时振动等高质量的机器人操作。
最佳的加速/减速运动
在抑制振动的同时产生高速运行的加速/减速运动。
紧凑的设计
外部尺寸约为。355mm(宽)× 195mm(高)× 130mm(深)。与传统的4轴控制器相比,降低了85%,实现了紧凑的设计,使控制面板内部的安装变得容易。

改善周期时间
YK-XG系列的速度更快。
例如YK400XG
标准循环时间操作0.49秒。0.45秒。
增加用户内存容量。
点数大大增加。
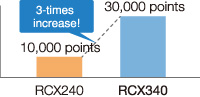
程序和点数的总容量

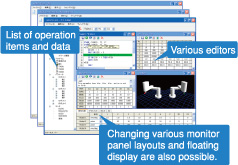
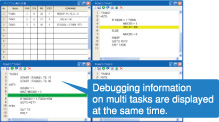
新的支持软件“RCX-Studio”,提高了可视性和可操作性
程序调试功能增强,支持多任务。快速设置是可能的,易于使用的可操作性和程序输入支持功能。
与YAMAHA机器人相比,更容易使用和更快的设置/有效的维护
操作系统易于使用
程序调试功能增强,支持多任务。
程序输入支持功能

新编程盒PBX
本编程盒支持“日语”、“英语”和“中文”三种语言。彩色显示的使用大大提高了能见度。
函数添加和编辑操作变得很容易,即使是编程技能较低的新手也可以操作编程盒。
该编程盒还包含了将控制器数据保存到USB存储器中的功能。

03更充实的可扩展性
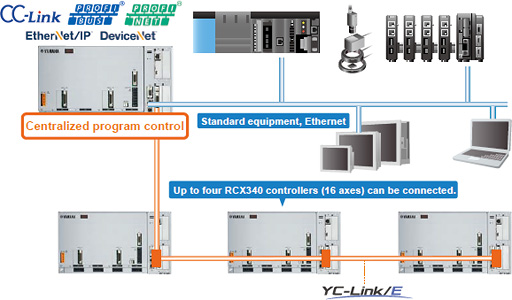
标准配置RS-232C和以太网接口。支持多种高速和大容量现场网络,如CC-Link、DeviceNet™和EtherNet/IP™。与通用伺服放大器或其他公司的VISION连接很容易。因此,RCX340被称为“可连接控制器”。

支持多种现场总线。/最多连接4个控制器,对多个机器人进行集中控制。
标准配置RS-232C和以太网接口。此外,还支持实现现场总线,如CC-Link、EtherNet/IP™、DeviceNet™、PROFIBUS、PROFINET和EtherCAT,以连接和控制各种各样的设备。对于5个或更多轴,使用YC-Link/E可以连接最多4个RCX340控制器,从而对多个机器人进行集中控制。此外,当使用YC-Link/E时注1,可以处理多个机器人,就像使用一个控制器操作它们一样。这确保了非常容易的机器人编程和管理。
因此,该机器人控制器有助于减少无形成本,如安装工作所需的人工成本。
注1。订购YC-Link/E时,请指定哪个机器人连接哪个数字控制器。
多轴控制器RCX340
相关内容



机器人操作
销售及市场组
FA销售和市场部门
日本静冈县滨松北区丰丰127号,邮编433-8103
电话81-53-525-8350/
传真81-53-525-8378